اخیرا یک گیره رباتیک اوریگامی ساخته شده که قادر است طیف گسترده ای از اشیاء ظریف تا سنگین را بگیرد.
پنجاه سال قبل اولین بازوی رباتیک صنعتی که Unimateنام داشت، توانست صبحانهی ساده ای را گردآوری کند. هر حرکت و جاگیری این بازو با دقت بالا کدگذاری شده بود.
چنین حرکاتی حتی در رباتهای بسیار هوشمند و انعطاف پذیر امروز به دلیل بازوهای سفت رباتها، حرکتی دشوار است. رباتها به محیطهای ساختاریافته و اشکال و موقعیتهای از پیش تعریف شده گرایش دارند و معمولا نمی توانند با عدم قطعیت شکل و موقعیت روبرو شوند.
در سالهای اخیر برای مقابله با این مساله، رباتهایی ساخته شده که انگشتانی از جنس مواد نرم و انعطاف پذیر مثل لاستیک دارند. این انعطاف پذیری باعث شده بتوانند اشیاء مختلف را حرکت دهند اما هنوز قادر نیستند که اجسام بزرگ و سنگین را جابجا کنند.
اخیرا محققان دانشگاه MITیک گیره جدید رباتیک عرضه کرده اند که هم انعطاف پذیر و هم قدرتمند است. ساختاری اوریگامی این گیره که اشیاء را در خود فرو می برد، می تواند اقلامی 100 برابر وزن گیره را بلند کند. این گیره می تواند طیف وسیعی از اشیائی چون چکش، قوطی های کنسرو، کوادکوپتر، حتی یک گل کلم بروکلی را بگیرد.
محققان این طرح یکی از دلایل ساخت این گیره رباتیک را استفاده از آنها در خطوط بسته بندی عنوان کردهاند. آنها بیان داشته اند در روشهای قبلی بازوها قادر بودند دسته محدودی از اشیاء ( اشیاء بسیار سبک یا اجسامی که شکل مشخصی مثل جعبه یا استوانه دارند) را بگیرند، اما سیستم گیره جادویی توپ می تواند گروه وسیعی از اشیایی چون بطری، قوطی و تخم مرغ را گرفته و جابجا کند. اشیاء سنگین تا سبک، اشیاء با اشکال منظم و غیر منظم در این گروه قرار می گیرند.
این پروژه یکی از چندین تحقیق سالهای اخیر در طراحی رباتها است. گیره توپی شکل می تواند طیف وسیعی از اجسام را مانند انگشتان بگیرد اما آنها هنوز محدودیت زاویه دارند. انگشتان رباتیکی نرم تر، معمولا از هوای فشرده استفاده می کنند ولی آنچنان قوی نیستند که بتوانند اجسام سنگین تر را جابجا کنند.
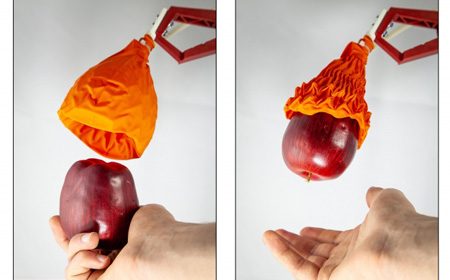
ساختار این گیره جدید با نمونه های قبلی کاملا متفاوت است. این گیره رباتیک مخروطی شکل، توخالی و دارای قدرت وکیوم، از توپ جادویی اوریگامی الهام گرفته شده است و می تواند کل شیء را دربرگیرد و آن را جابجا نماید.
این گیره رباتیک دارای سه بخش است؛ ساختار اسکلتی اوریگامی شکل، پوسته هوابندی شده و اتصال دهنده. این تیم تحقیقاتی با استفاده از قالب مکانیکی پلاستیکی و پلاستیک گرم کننده مخصوص که خودش دما را بالا می برد ساخته شده است.
اسکلت توپ جادویی توسط یک بالن لاستیکی یا یک صفحه پارچه ای پوشیده شده است و برخلاف انواع قبلی در عضله های مصنوعی الهام گرفته شده از اوریگامی و پوسته هوابندی شده اطراف اسکلت که قابلیت تا شدن دارد، مایعی جاریست.
این گروه تحقیقاتی گیره رباتیک را به همراه یک ربات استاندارد برای جابجایی اجسام مختلف امتحان کردند. گیره رباتیک می تواند اشیاء مختلف نرم را بگیرد و بلند کند، بدون اینکه به آنها آسیبی برساند. همچنین می تواند بطریهایی با حدود وزن 2 کیلوگرم را از جای خود بلند کند.
شرکتهای همچون آمازون مایلند طیف وسیعی از اجسام ظریف و فاقد شکل منظم را بردارند اما با گیره های انگشت مانند و بادکشی نمی توانند این کار را انجام دهند. گیره های بادکشی نمی توانند هر شئی را بلند کرده و نگه دارند. همچنین برای جابجائی بعضی از اشیاء نیاز به گیره های قوی تری هست.
رباتهای رایج با اجسام استوانه ای شکل مثل بطری ها یا قوطی ها بهتر کار می کنند و در خطوط تولید کارخانه ها کاربرد دارند. جای تعجب نیست که شکل گیره باعث می شود بعضی اجسام صاف مثل ساندویچ یا کتاب به سختی توسط گیره گرفته شوند.
یکی از ویژگیهای کلیدی این روش در ساخت بازوی مکانیکی، سادگی آن است. مواد و استراتژی های ساخت به کار رفته در آن این امکان را فراهم می کند تا به سرعت نمونه های جدید گیره برای اجسام خاص ساخته شود. این تیم امیدوار است در آینده مشکل زاویه و جهت را حل کرده و با اضافه کردن دید کامپیوتری امکان دید گیره فراهم شده و قسمتهای مشخصی از اشیاء توسط گیره رباتیک گرفته شود.
محققان این پروژه اظهار داشته اند این دستگاه دارای قابلیت بالائی است و برای حل مساله گرفتن اشیاء در آن از قدرت پرینت سه بعدی، وکیوم و رباتیک نرم استفاده شده است. آنها امیدوارند بتوانند در سالهای آتی رباتهایی عرضه کنند که قادر باشند یک گل رز را بردارند و همچنین به اندازه ای قدرت داشته باشند که بتوانند مریض را در بیمارستان جابجا کنند.
این پروژه توسط بخشی از آژانس پروژه های تحقیقاتی دفاعی موسسه ویس هاروارد پشتیبانی می شود.